SERIJA ELEKTRIČNIH HVATALJKI HITBOT – Z-EFG-20 Paralelna električna hvataljka


Glavna kategorija
Industrijska robotska ruka / Kolaborativna robotska ruka / Električna hvataljka / Inteligentni aktuator / Rješenja za automatizaciju
Primjena
SCIC Z-EFG serija robotskih hvataljki male je veličine s ugrađenim servo sustavom koji omogućuje preciznu kontrolu brzine, položaja i sile stezanja. SCIC vrhunski sustav hvatanja za automatizacijska rješenja otvorit će vam nove mogućnosti za automatizaciju zadataka za koje nikada niste mislili da su mogući.

Značajka

· Ugrađeni kontroler
· Podesivi hod i sila hvatanja
· Kraj se može zamijeniti kako bi se prilagodio raznim potrebama
· Pokupite lomljive i deformabilne predmete poput jaja,epruvete, prstenovi itd.
·Primijenite za scene bez izvora zraka (npr. laboratorij, bolnica)
Točnost kontrole, stezanje u malom prostoru Brzo i stabilno stezanje
Velika stezna sila
Ukupni hod je 20 mm, sila stezanja je 80 N.
Točnost za kontrolu
Ponovljivost: ±0,02 mm
Dugi vijek trajanja
Deseci milijuna ciklusa, izvan zračnog hvataljka
Kontroler je ugrađen
Zauzima malo prostora, pogodno za integraciju.
Način upravljanja
Pulsni, I/O kontroleri za opciju
Meko stezanje
Može stezati lomljive predmete




Parametar specifikacije
| Broj modela Z-EFG-20 | Parametri |
| Ukupno moždani udar | 20 mm |
| Sila hvatanja | 30~80N |
| Ponovljivost | ±0,02 mm |
| Preporučena težina hvatanja | 0,8 kg |
| Prijenos način rada | Zupčasta letva + Vodilica s križnim valjcima |
| Dopunjavanje mašću pokretnih komponenti | Svakih šest mjeseci ili 1 milijun pokreta / vrijeme |
| Vrijeme jednosmjernog hoda | 0,45 s |
| Raspon radne temperature | 5-55℃ |
| Radni raspon vlažnosti | RH35-80(Bez mraza) |
| Način kretanja | Dva prsta se pomiču vodoravno |
| Kontrola udara | Podesivo |
| Podešavanje sile stezanja | Podesivo |
| Težina | 0,458 kg |
| Dimenzije(D*Š*V) | 44*30*124,7 mm |
| Položaj kontrolera | Ugrađeno |
| Vlast | 5W |
| Vrsta motora | DC bezčetkice |
| Vršna struja | 1A |
| Nazivni napon | 24V |
| Struja u stanju pripravnosti | 0,2 A |
| Otporno na udarce / otporno na vibracije | 98 m/s |
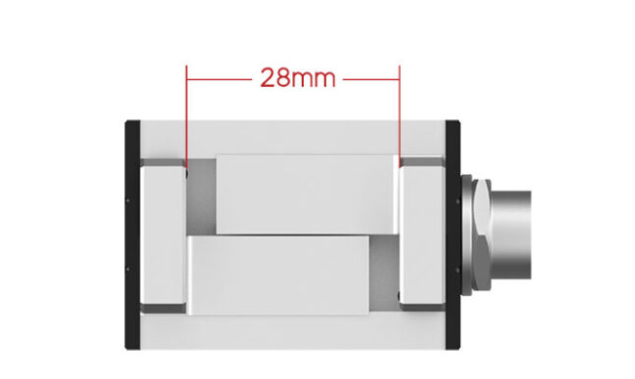
| Promjer motora | 28 mm |
* Sila hvatanja Z-EFG-20: Sila hvatanja može se podesiti dodavanjem kontroliranog deformacijskog materijala na prednju stranu uređaja, što se dobiva prema odgovarajućoj krivulji deformacije i sile.
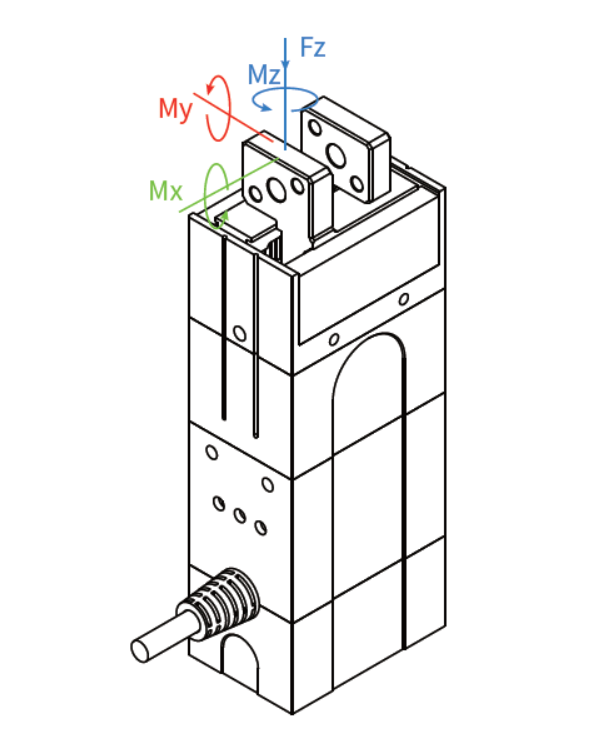
| Dopušteno statičko opterećenje u vertikalnom smjeru | |
| Fz: | 150N |
| Dopušteni okretni moment | |
| Mx: | 2,1 Nm |
| Moj: | 2,34 Nm |
| Mz: | 2 Nm |
Velika stezna sila, precizna kontrola sile

Električna hvataljka ima poseban dizajn prijenosa i kompenzaciju pogona, sila stezanja je kontinuirano podesiva 80N, ukupni hod je 20 mm, a ponovljivost je ±0,02 mm.
Podesivi način kretanja i hod
Kretanje električne hvataljke pripada paralelnom kretanju s dva prsta, najkraće vrijeme jednog hoda je samo 0,45 s, težina stezanja ≤ 0,8 kg, što može zadovoljiti zahtjev stabilnog stezanja za proizvodnu liniju.
Kompaktna struktura, fleksibilna za ugradnju.

Veličina Z-EFG-20 je D40*Š30*V124,7 mm, njegova struktura je kompaktna, podržava više od pet načina instalacije, ima ugrađeni kontroler, zauzima malo prostora, što olakšava obavljanje raznih zadataka stezanja.


Integrirani pogon i kontroler, meko stezanje

Rep Z-EFG-20 može se jednostavno mijenjati, kupci mogu stezati objekte po svom zahtjevu, dizajnirati rep i koristiti električnu hvataljku za maksimalno obavljanje zadataka stezanja.
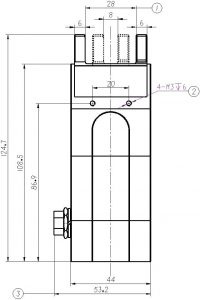
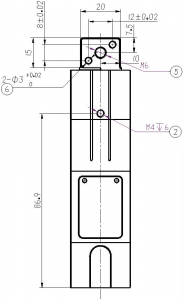
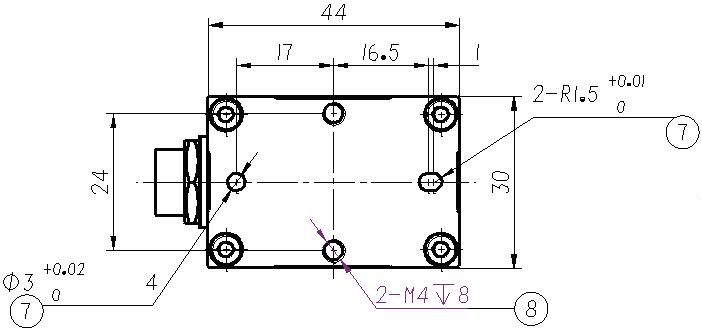
Dijagram instalacije s dimenzijama
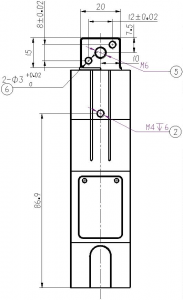
① Hod pokreta hvataljki
② Bočni položaj montaže (navojna rupa)
③ Mjesto ožičenja zrakoplovne utičnice
④ Položaj sile podešavanja hvataljke (lijevo) i indikatorske lampice (desno)
⑤ Položaj ugradnje hvataljke (navojna rupa)
⑥ Položaj ugradnje hvataljke (otvor za iglu)
⑦ Donji položaj montaže (otvor za iglu)
⑧ Donji položaj montaže ((navojna rupa)
Naše poslovanje


Kategorije proizvoda
-

HITBOT SERIJA ELEKTRIČNIH HVATALJKI – Z-EFG-C5...
-

DH ROBOTICS SERVO ELEKTRIČNA HVATALJKA PGE SERIJE –...
-

DH ROBOTICS SERVO ELEKTRIČNA HVATALJKA RGI SERIJE –...
-

DH ROBOTICS SERVO ELEKTRIČNA HVATALJKA RGI SERIJE –...
-

DH ROBOTICS SERVO ELEKTRIČNA HVATALJKA RGI SERIJE –...
-

DH ROBOTICS SERVO ELEKTRIČNA HVATALJKA PGC SERIJE –...