Hvataljka za kolaborativni robot – ISC Inner Soft Clamp Cobot Arm Gripper



Glavna kategorija
Industrijska robotska ruka / Kolaborativna robotska ruka / Električna hvataljka / Inteligentni aktuator / Rješenja za automatizaciju / hvataljka za kobotsku ruku / mekana hvataljka / hvataljka za robotsku ruku
Primjena

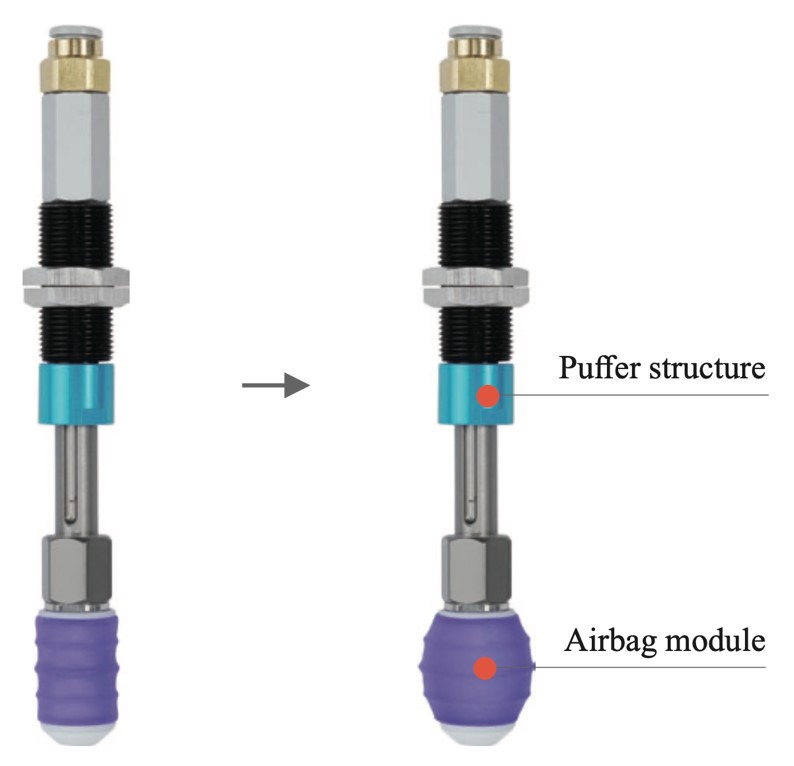
ISC unutarnja potporna stezaljka je inovativni mekani uređaj čiji dizajn oponaša morfologiju samoobrane ribe napuhače. Napuhivanjem zraka pod tlakom, uređaj se može proširiti i dovršiti hvatanje unutarnje potpore.
Budući da je dio koji dodiruje obradak od mekane silikonske gume, nakon dodavanja pritiska, između krute potporne i kontaktne površine stvorit će se sloj "zračnog jastuka", što će ujednačiti napon i spriječiti oštećenje obradka. Osim toga, ulazni tlak zraka može se podesiti kako bi se kontroliralo produženje zračnog jastuka i napon koji dodiruje obradak, što značajno povećava mekoću sustava hvatanja.
Značajka

·Medij za vožnju: čisti zrak
·Standardni radni vijek: >100.000 puta
·Maks. radna frekvencija (cpm): 300
● Unutarnja potporna stezaljka ima posebnu strukturu zračnog jastuka i može proizvesti različite deformacije zajedno s unutarnjim tlakom.
● Ulazni pozitivni tlak: Pribor se izvlači, samoadaptivno se podupire na unutarnjoj površini predmeta i dovršava hvatanje.
● Ulazni negativni tlak: Učvršćivač predstavlja prirodno stanje i otpušta objekte.
SFG mekane hvataljke su korištene sa svjetski poznatim kolaborativnim robotskim rukama, uključujući:

4-osni horizontalni (SCARA) robot Delta
Ruka industrijskog robota Nachi Fujikoshi
4-osni paralelni (Delta) robot ABB
6-osni kolaborativni robot UR
6-osni kolaborativni robot AUBO



Parametar specifikacije
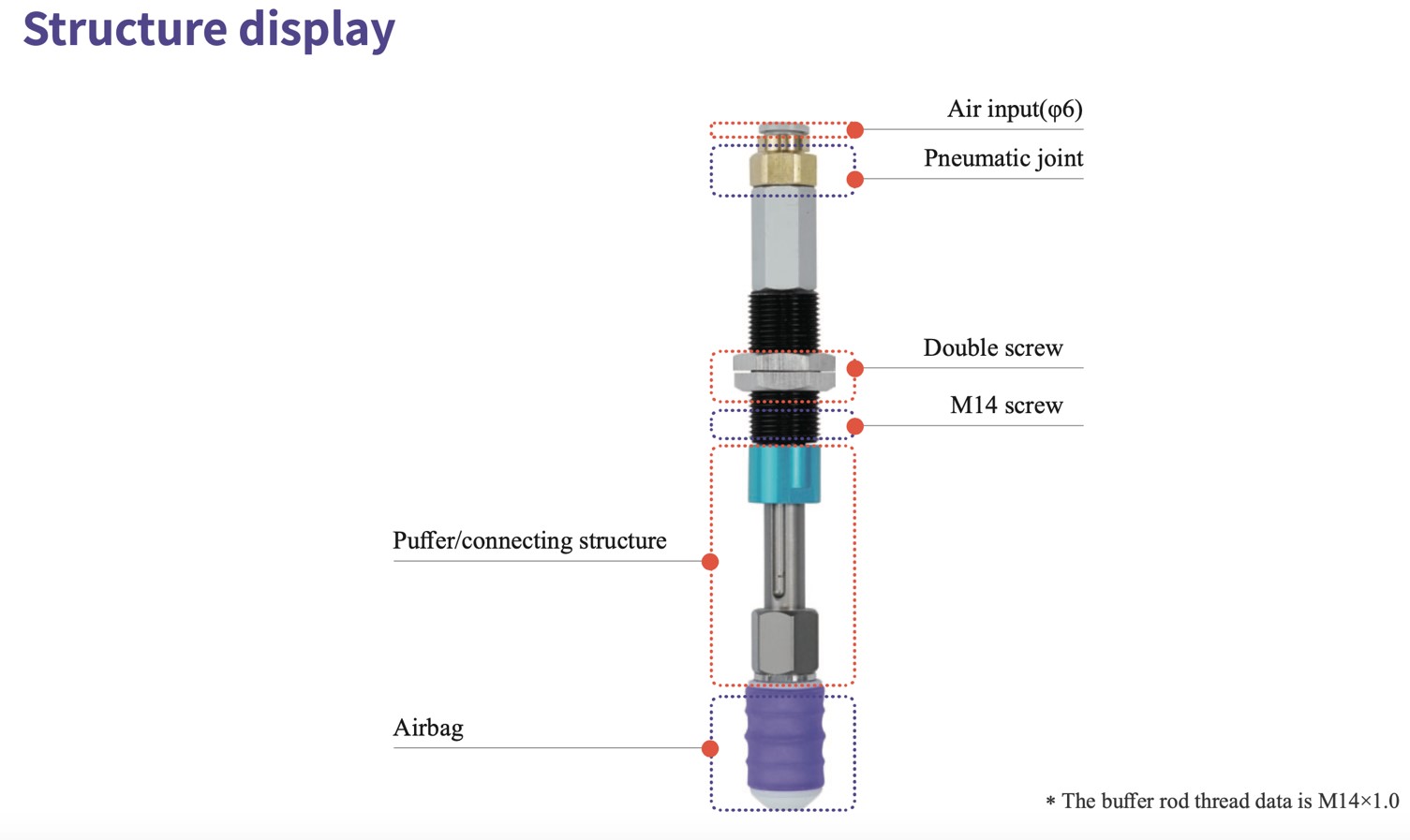
ISC unutarnja stezaljka za zračni jastuk inovativni je mekani uređaj čiji dizajn oponaša morfologiju samoobrane ribe napuhače. Napuhivanjem zraka pod tlakom, uređaj se može proširiti i dovršiti unutarnje hvatanje potpore. Budući da se tlak ulaznog zraka može precizno kontrolirati, može se kontrolirati sila hvatanja uređaja za radni komad, što ne omogućuje oštećenje obradka.
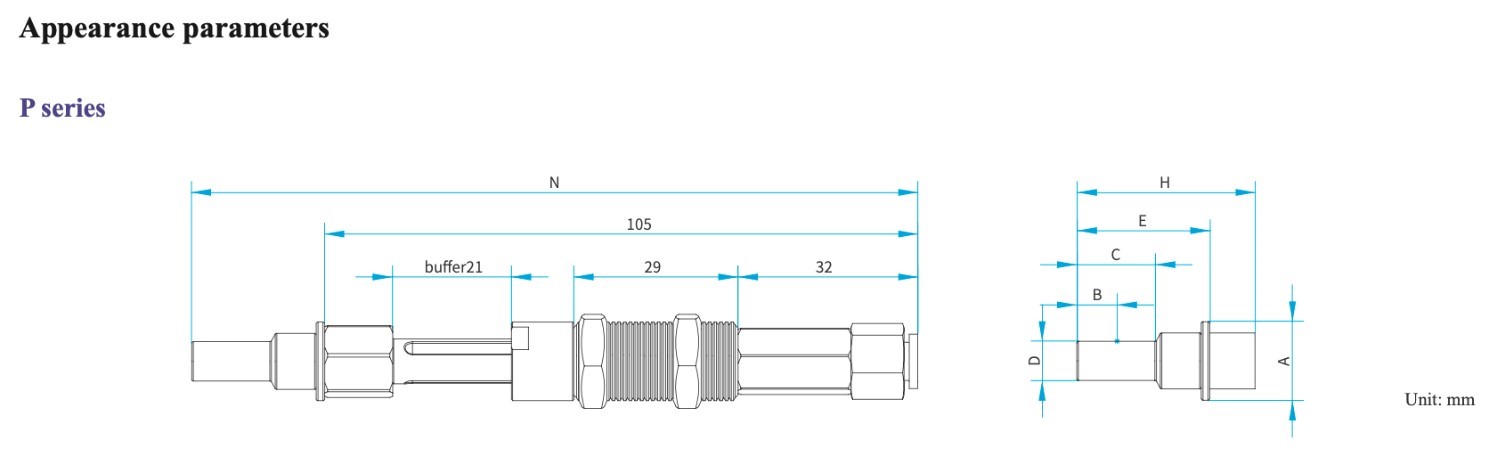
| Model | Ukupna visina modula zračnog jastuka H | Promjer kontaktne površine D | Promjer konstrukcijskog dijela A | Visina od radnog promjera do dna B | Visina efektivne kontaktne površine C | Radna visina zračnog jastuka modul E | Ukupna duljina N |
| ISC-P4.5E | 25,5 | 4,5 | 14 | 4 | 8 | 17,5 | E+105 |
| ISC-P5E | 27,5 | 5 | 14 | 5 | 10 | 19,5 | E+105 |
| ISC-P6E | 30,5 | 6 | 14 | 6 | 12 | 22,5 | E+105 |
| ISC-P7E | 31,5 | 7 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P8E | 31,5 | 8 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P9E | 32,5 | 9 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P10E | 32,5 | 10 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P11E | 34,5 | 11 | 14 | 7,5 | 15 | 26,5 | E+105 |
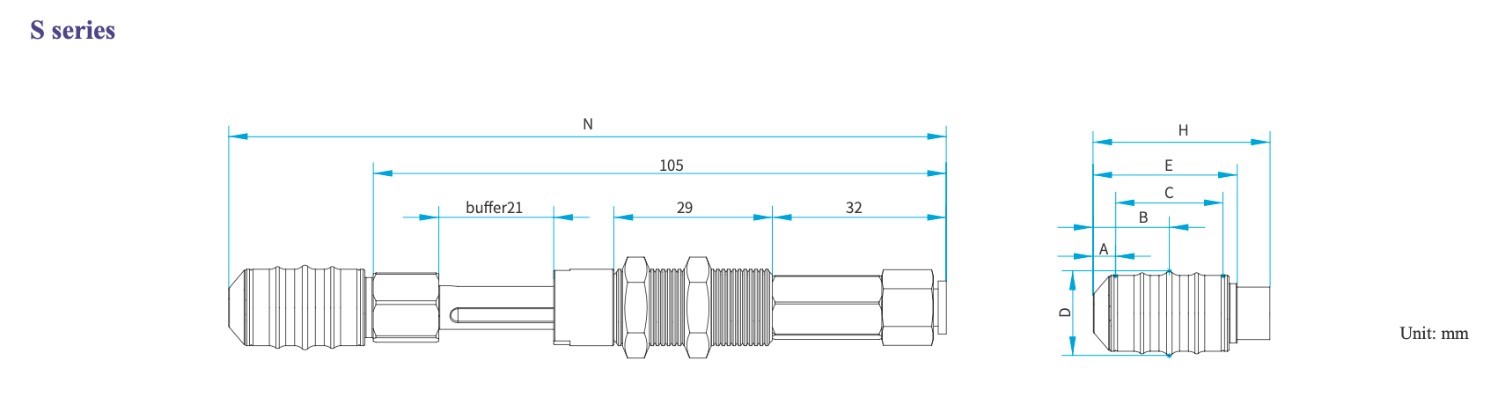
| Model | Ukupna visina modula zračnog jastuka H | Promjer kontaktne površine D | visina vodilice A | Visina od radnog promjera do dna B | Visina efektivne kontaktne površine C | Radna visina zračnog jastuka modul E | Ukupna duljina N |
| ISC-S14E | 32,5 | 14 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S15.5E | 32,5 | 15,5 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S18E | 40,5 | 18 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S20.5E | 40,5 | 20,5 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S23E | 40,5 | 23 | 6 | 19 | 26 | 34,5 | E+105 |
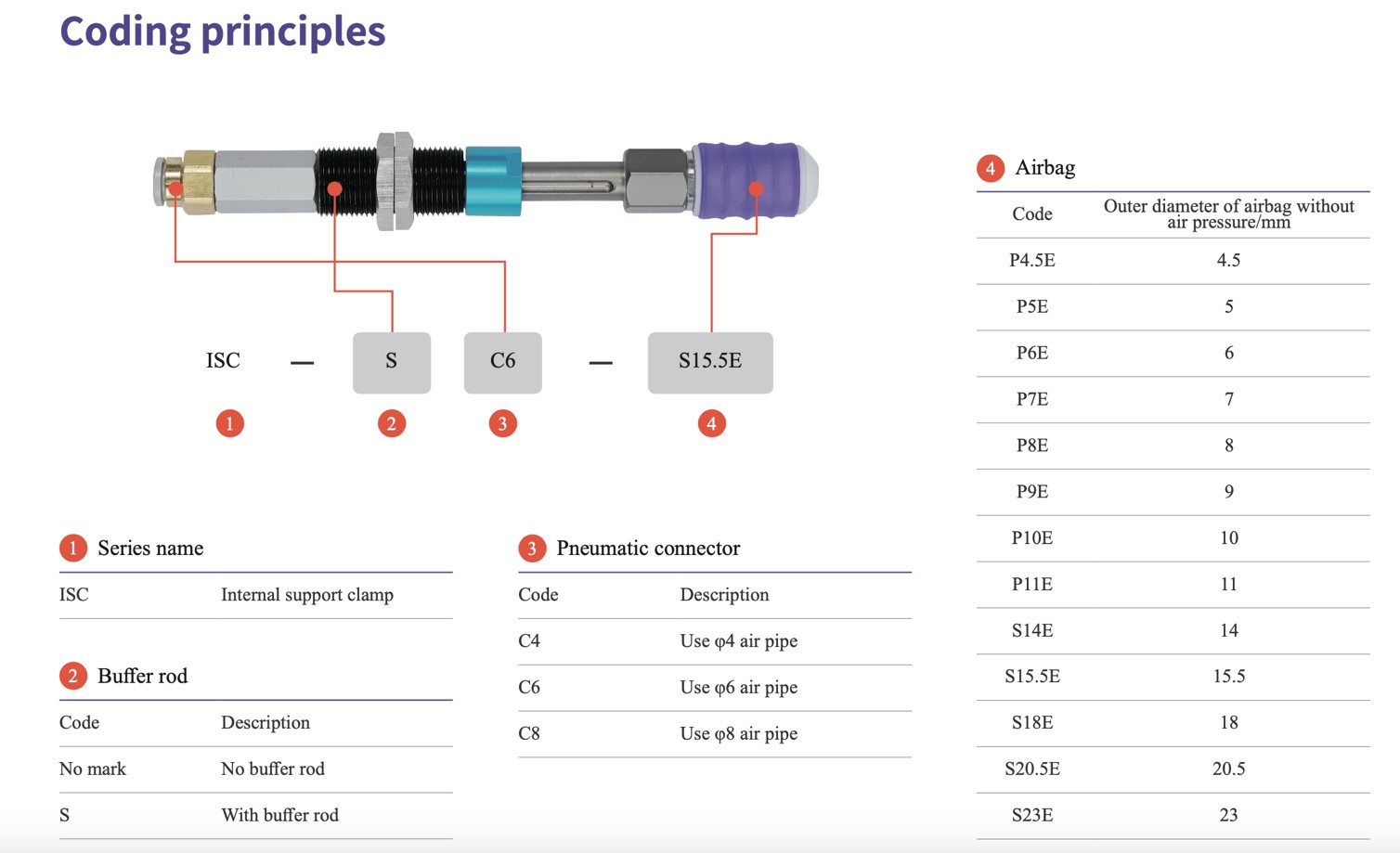
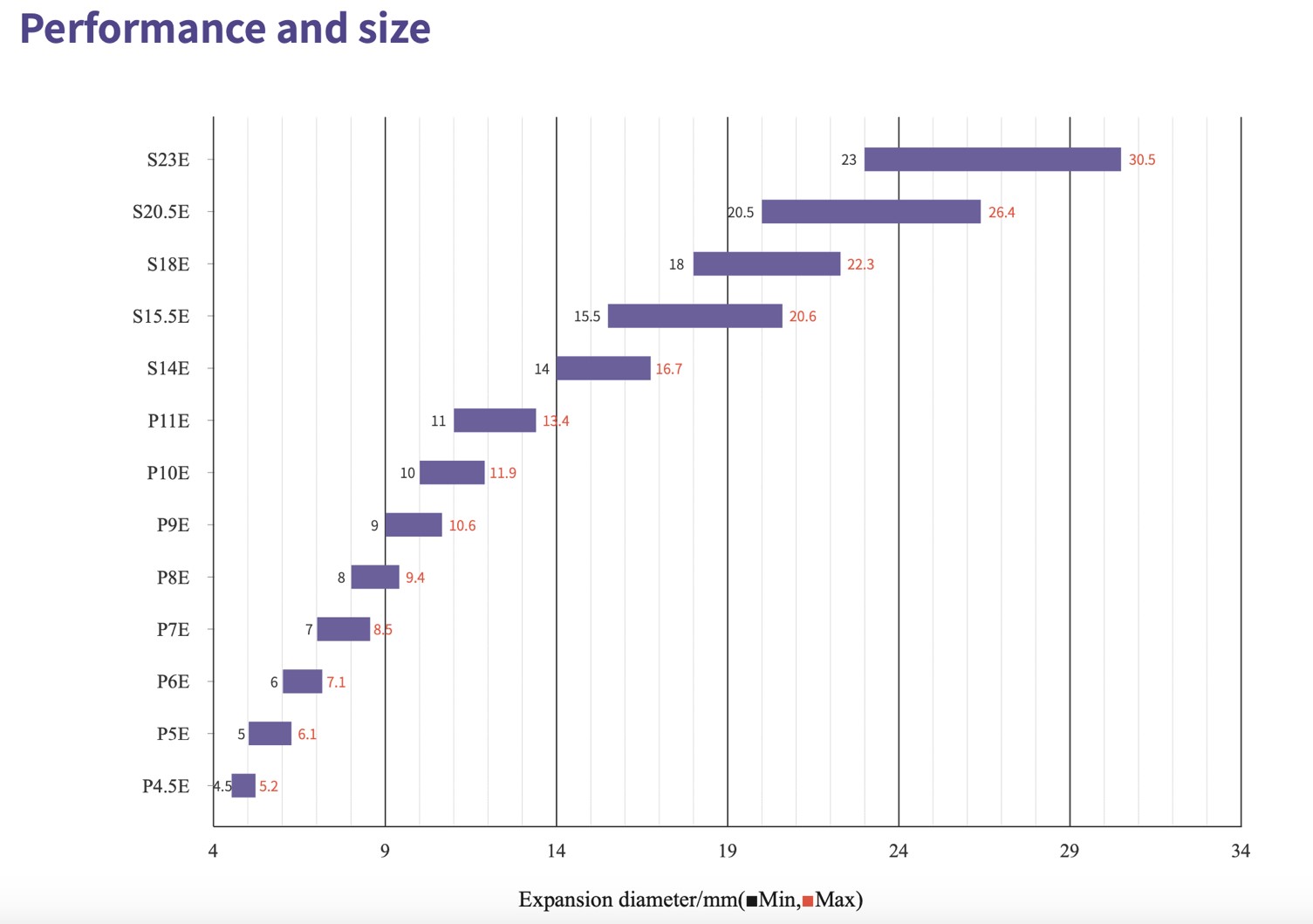
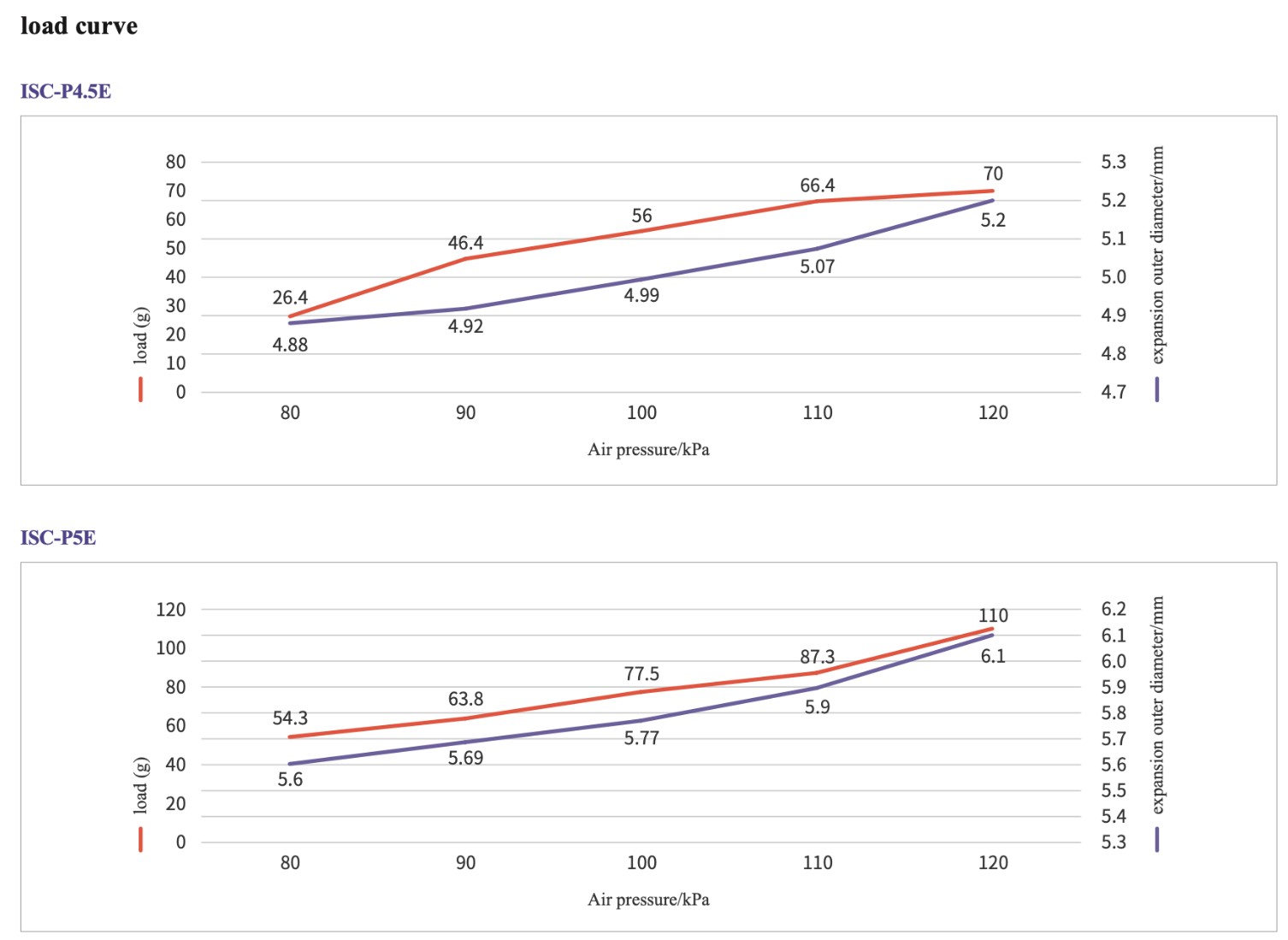
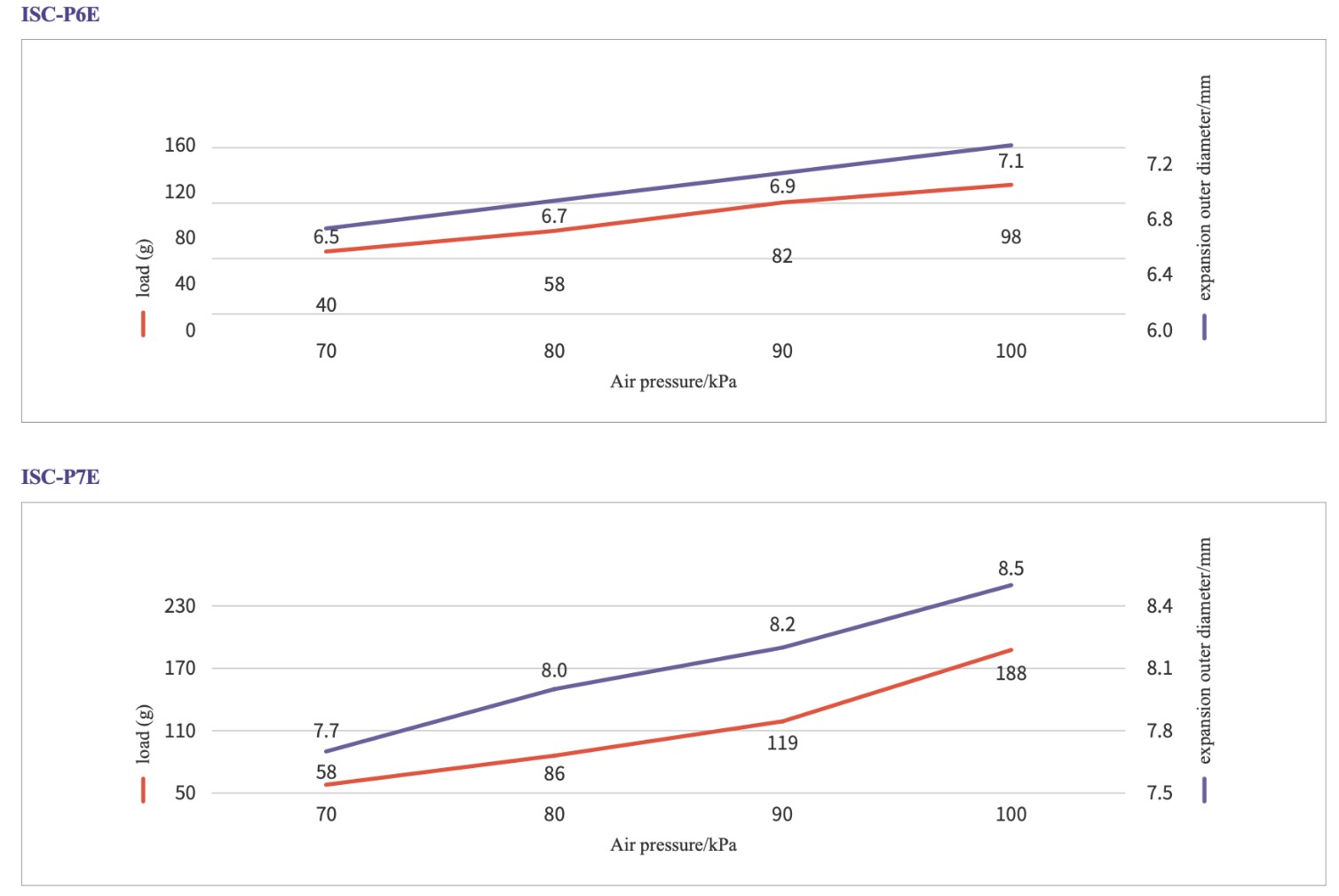
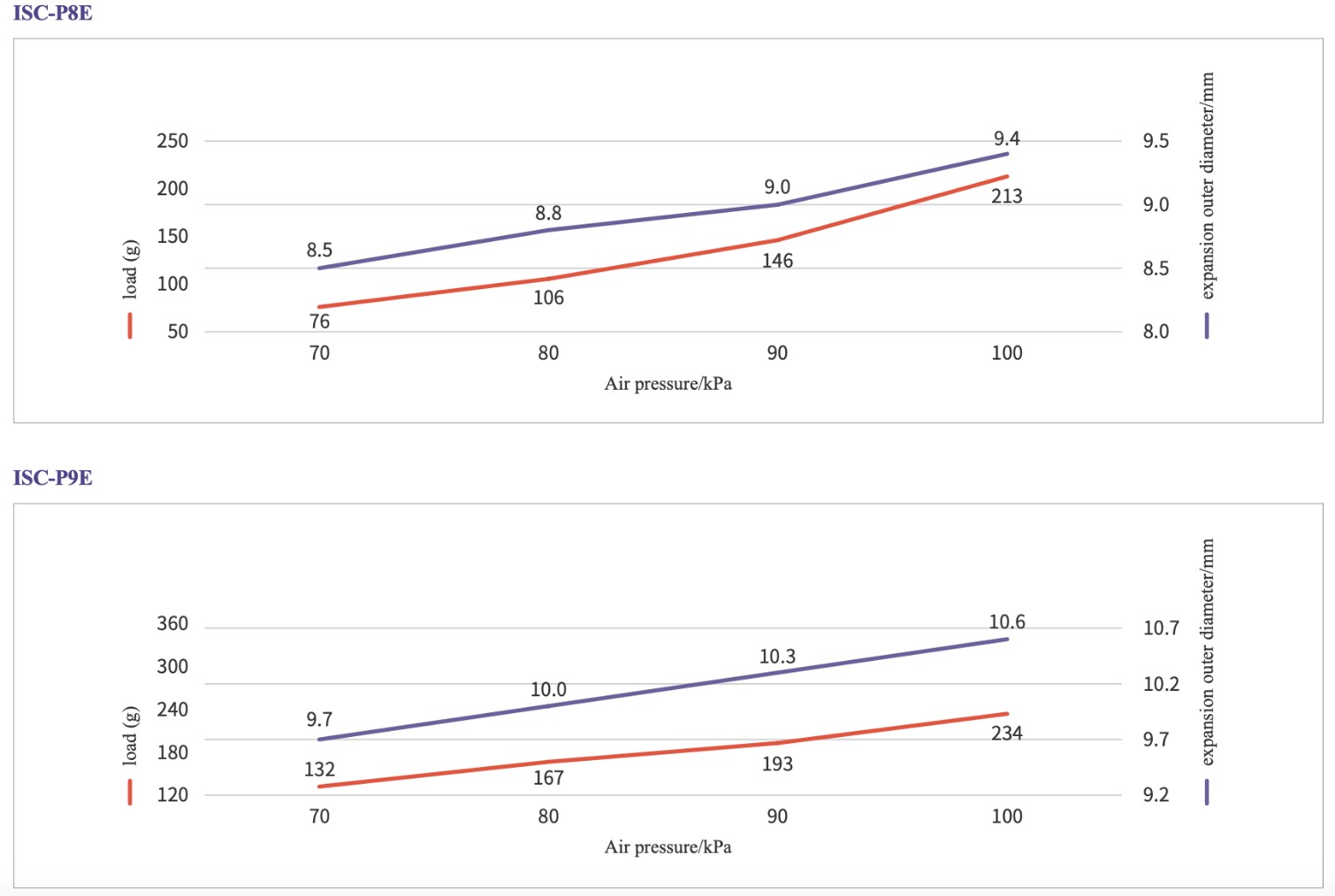
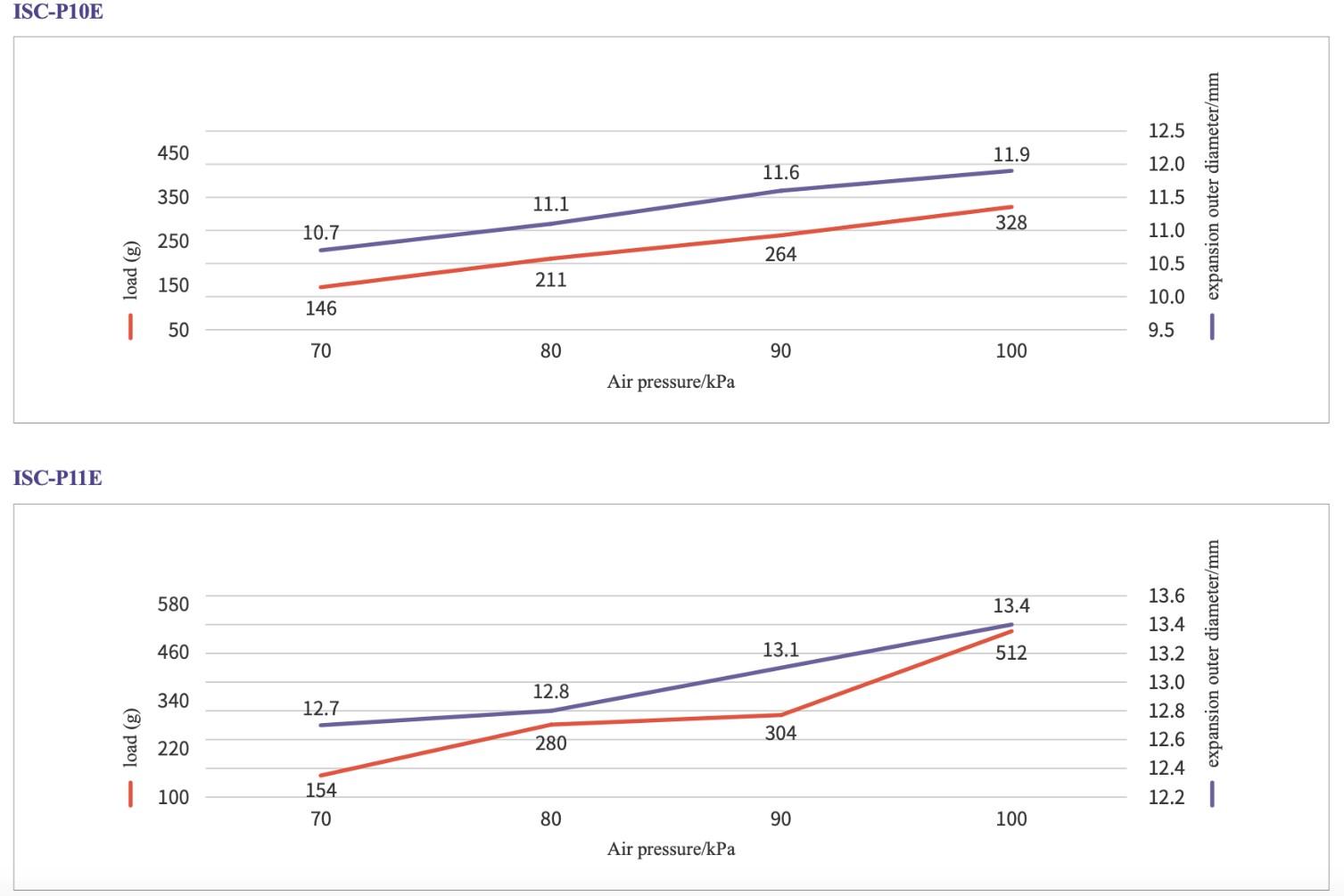
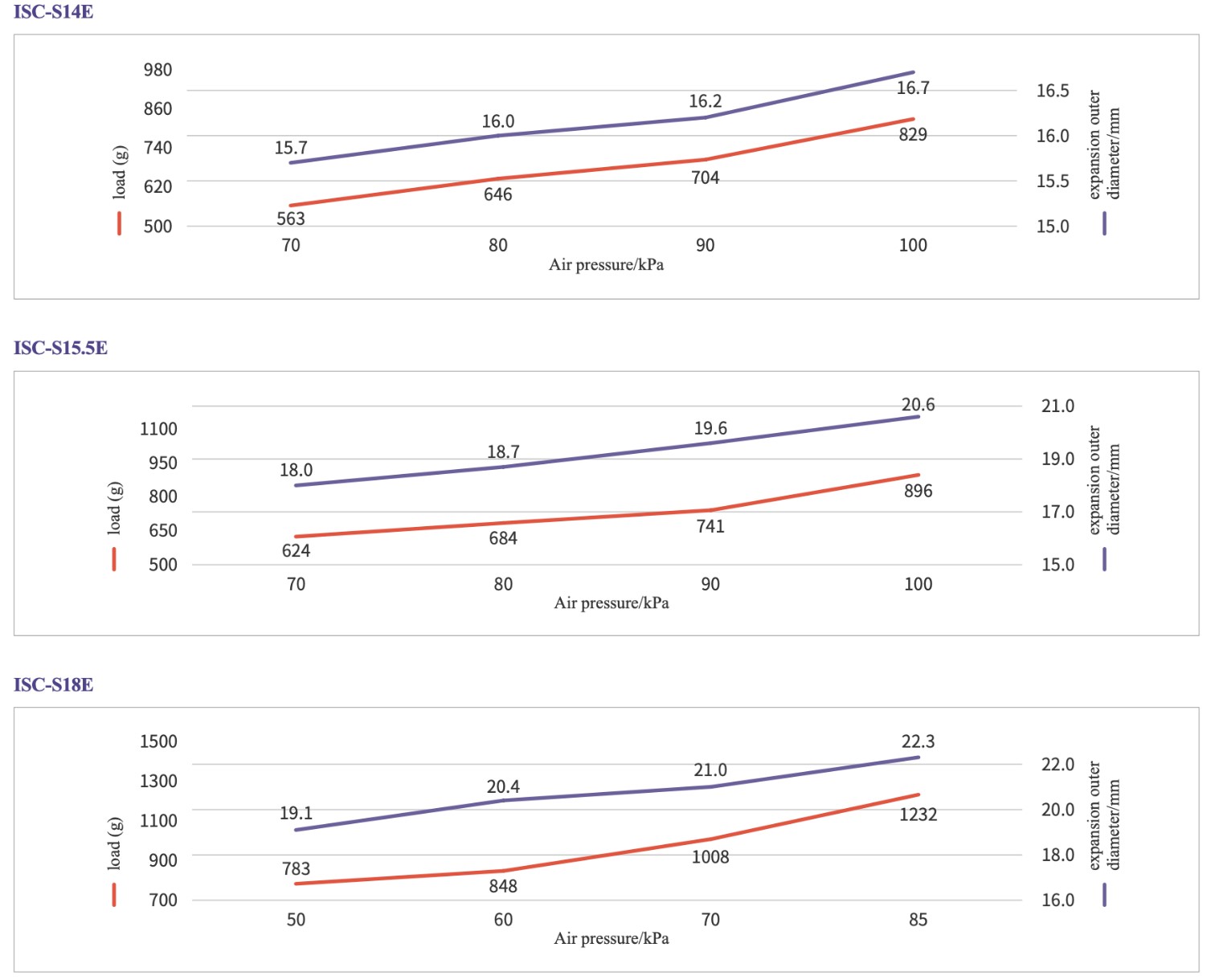
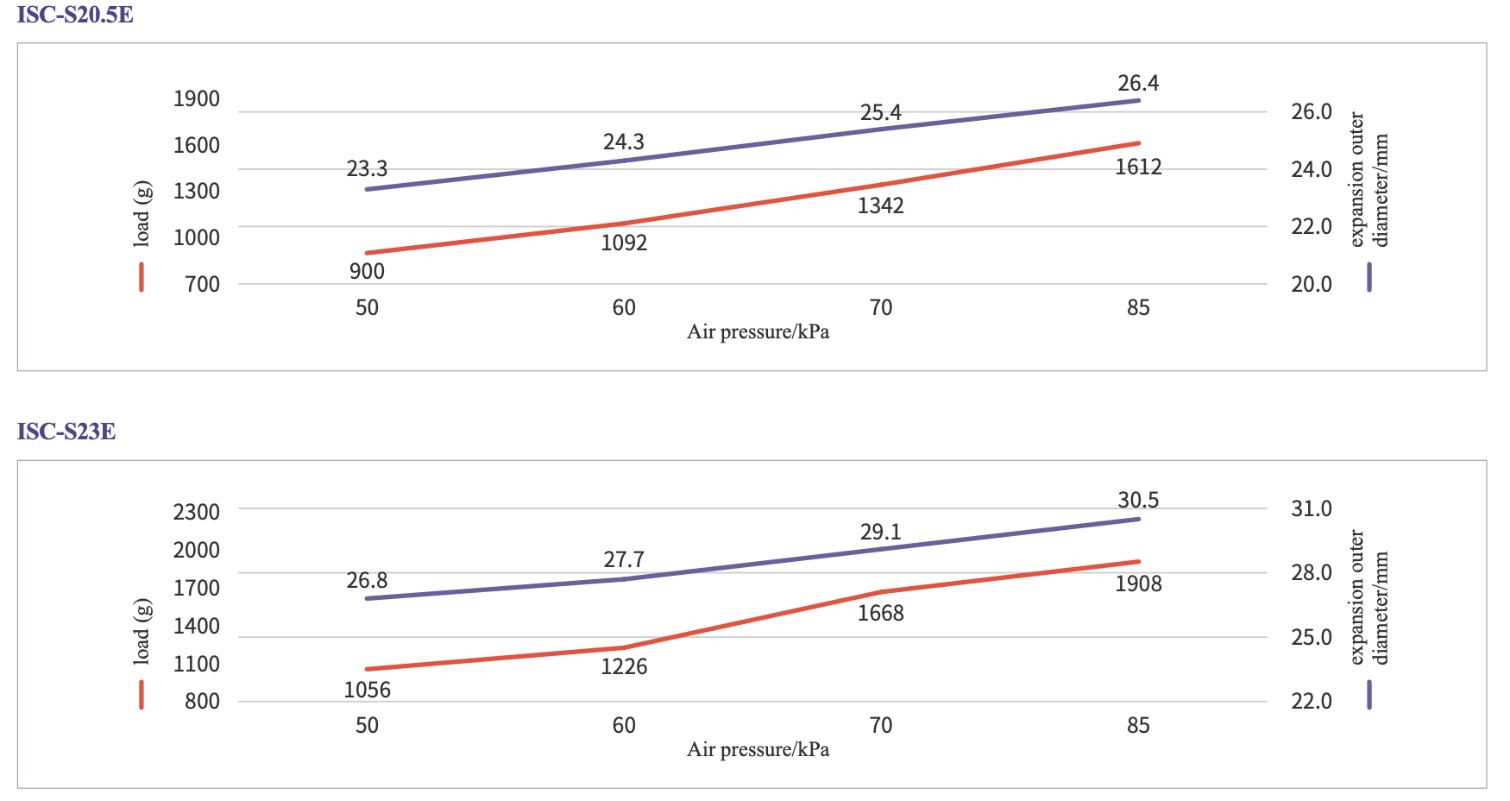
Prošireni vanjski promjer
| Model | Raspon radnog tlaka /kPa | Maksimalno širenje vanjskog promjera/mm | Maksimalno opterećenje/g | Težina uređaja/g | Model metalne šipke | Dimenzija montažne rupe/mm |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P7E | 0-100 | 8,5 | 188 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P10E | 0-100 | 11,9 | 328 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S14E | 0-100 | 16,7 | 829 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S15.5E | 0-100 | 20,6 | 896 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S20.5E | 0-85 | 26,4 | 1612. | 49 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S23E | 0-85 | 30,5 | 1908. | 51 | VFNT 1421-G18 | 14,5 |
* P serija Maksimalno opterećenje objekta ispitivanja je vanjski promjer modela +0,3 mm; S serija Maksimalno opterećenje objekta ispitivanja je vanjski promjer modela +1 mm; Ispitivanje opterećenja mjeri se profesionalnim instrumentima.
Naše poslovanje







