SCARA ROBOTSKA RUKA – Z-Arm-4160B Kolaborativna robotska ruka





Glavna kategorija
Industrijska robotska ruka / Kolaborativna robotska ruka / Električna hvataljka / Inteligentni aktuator / Rješenja za automatizaciju
Primjena
SCIC Z-Arm koboti su lagani 4-osni kolaborativni roboti s ugrađenim pogonskim motorom i više ne zahtijevaju reduktore kao drugi tradicionalni SCARA roboti, što smanjuje troškove za 40%. SCIC Z-Arm koboti mogu ostvariti funkcije uključujući, ali ne ograničavajući se na 3D ispis, rukovanje materijalima, zavarivanje i lasersko graviranje. Sposobni su uvelike poboljšati učinkovitost i fleksibilnost vašeg rada i proizvodnje.
Značajke

Visoka preciznost
Ponovljivost
±0,02 mm
Prilagođena Z-os
0,1-0,8 m
Veliki korisni teret
Stalak 4 kg
Maks. 5 kg
Veća brzina
Maks. linearna brzina 2m/s
(Nosivost postolja 5 kg)
Veliki raspon ruke, visokoprecizna 4-osna robotska ruka s jednostavnim korištenjem
Visoka preciznost
Ponovljivost: ±0,02 mm
Veliki raspon ruku
J1-Os: 325 mm,J2-os: 275 mm
Prilagođena Z-os
Hod gore-dolje može se prilagoditi između 0,1 m i 0,8 m
Ušteda prostora
Pogon/kontroler je ugrađen
Jednostavno i lako za korištenje
Novopridošli koji nisu poznavali robotsku ruku također mogu biti jednostavni za korištenje, sučelje se otvara.
Velika brzina
Njegova brzina je 2000 mm/s pod opterećenjem od 4 kg

Povezani proizvodi



Parametar specifikacije
SCIC Hitbot Z-Arm 4160B dizajnirala je tvrtka SCIC Tech, to je lagani kolaborativni robot, jednostavan za programiranje i korištenje, s podrškom za SDK. Osim toga, podržana je detekcija sudara, odnosno automatski se zaustavlja pri dodiru s čovjekom, što je pametna suradnja čovjeka i stroja, a sigurnost je visoka.
| Z-Arm 4160B Kolaborativna robotska ruka | Parametri |
| Duljina kraka 1 osi | 325 mm |
| Kut rotacije 1 osi | ±90° |
| Duljina kraka s 2 osi | 275 mm |
| Kut rotacije s 2 osi | ±164° Opcionalno: 15-345 stupnjeva |
| Hod osi Z | 410 Visina se može prilagoditi |
| Raspon rotacije osi R | ±1080° |
| Linearna brzina | 2000 mm/s (korisni teret 4 kg) |
| Ponovljivost | ±0,02 mm |
| Standardni korisni teret | 4 kg |
| Maksimalni korisni teret | 5 kg |
| Stupanj slobode | 4 |
| Napajanje | 220V/110V50-60HZ prilagođava se vršnoj snazi od 48VDC 960W |
| Komunikacija | Ethernet |
| Proširivost | Ugrađeni integrirani kontroler kretanja omogućuje 24 ulaza/izlaza + proširenje ispod ruke |
| Z-osi se može prilagoditi po visini | 0,1 m ~ 0,8 m |
| Učenje povlačenja po Z-osi | / |
| Električno sučelje rezervirano | Standardna konfiguracija: 24*23awg (neoklopljene) žice od ploče s utičnicama kroz donji poklopac kraka Opcionalno: 2 vakuumske cijevi φ4 kroz ploču s utičnicama i prirubnicu |
| Kompatibilne HITBOT električne hvataljke | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Disanje svjetla | / |
| Raspon pokreta druge ruke | Standardno: ±164° Opcionalno: 15-345° |
| Dodatna oprema | / |
| Koristite okruženje | Temperatura okoline: 0-45°C Vlažnost: 20-80% relativne vlažnosti (bez mraza) |
| Digitalni ulaz I/O porta (izoliran) | 9+3+ekstenzija podlaktice (opcionalno) |
| Digitalni izlaz I/O porta (izoliran) | 9+3+ekstenzija podlaktice (opcionalno) |
| Analogni ulaz I/O porta (4-20mA) | / |
| Analogni izlaz I/O porta (4-20mA) | / |
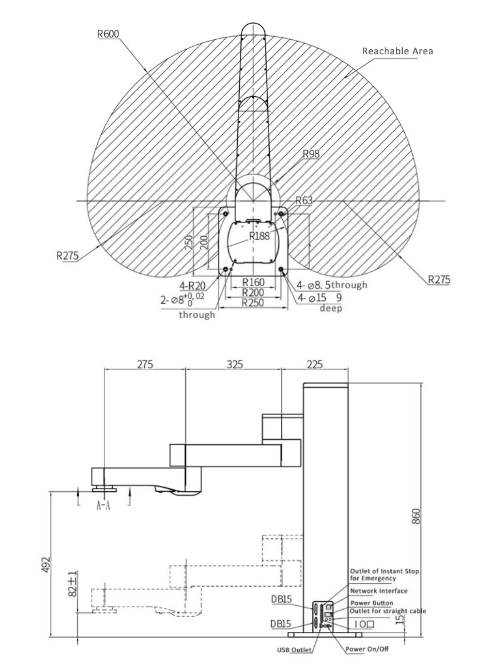
| Visina robotske ruke | 860 mm |
| Težina robotske ruke | Hod 410 mm, neto težina 36,5 kg |
| Osnovna veličina | 250 mm * 250 mm * 15 mm |
| Razmak između rupa za pričvršćivanje baze | 200 mm * 200 mm s četiri vijka M8 * 20 |
| Detekcija sudara | √ |
| Drag nastava | √ |
Idealan izbor za lagane montažne zadatke
Z-Arm XX60B je 4-osna robotska ruka s velikim rasponom ruke, koja zauzima malu površinu, vrlo je pogodna za postavljanje na radnu stanicu ili unutar stroja, idealan je izbor za lagane montažne zadatke.


Lagan s velikim kutom rotacije

Težina proizvoda je oko 36,5 kg, maksimalno opterećenje može biti do 5 kg, kut rotacije 1-os je ±90°, kut rotacije 2-os je ±164°, a raspon rotacije R-os može biti do ±1080°.
Veliki raspon ruku, široka primjena

Z-Arm XX60B ima dugi raspon ruke, duljina 1-osne ruke je 325 mm, duljina 2-osne ruke je 275 mm, a linearna brzina može doseći do 2000 mm/s pod opterećenjem od 4 kg.


Fleksibilno za implementaciju, brzo prebacivanje
Z-Arm XX60B ima karakteristike lagane težine, uštede prostora i fleksibilnosti za postavljanje, pogodan je za primjenu u mnogim primjenama i ne bi mijenjao prethodni raspored proizvodnje, uključujući brzu promjenu slijeda procesa i dovršetak proizvodnje malih serija itd.
DragTeaching to Complete Program

Softver je baziran na grafičkom dizajnu, ima module za točku, izlazni signal, električnu hvataljku, ladicu, odgodu, podproces, resetiranje i druge osnovne funkcionalne module. Korisnici mogu povući modul za upravljanje robotskom rukom u programskom području. Sučelje je jednostavno, ali funkcije su moćne.
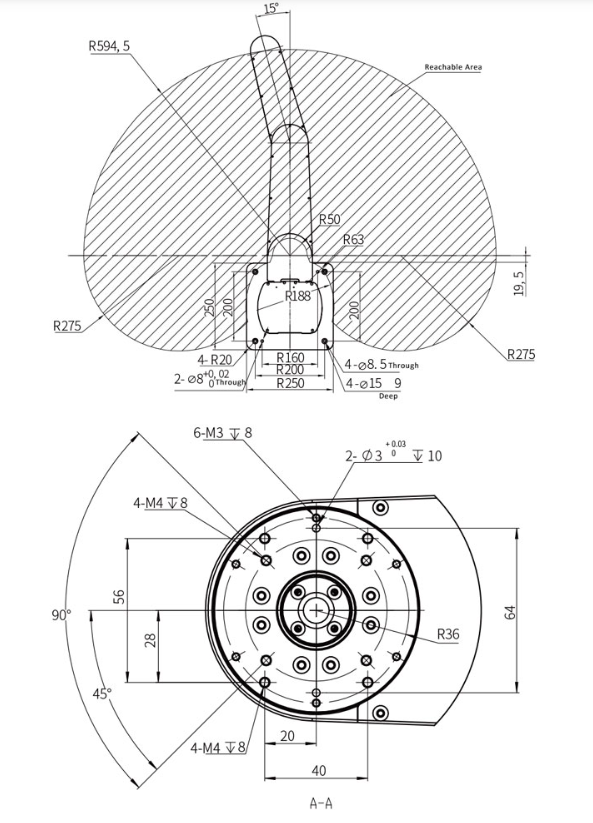
Raspon kretanja M1 verzija (rotiranje prema van)
Preporuka za DB15 konektor

Preporučeni model: Pozlaćeni muški konektor s ABS kućištem YL-SCD-15M Pozlaćeni ženski konektor s ABS kućištem YL-SCD-15F
Opis veličine: 55 mm * 43 mm * 16 mm
(Pogledajte sliku 5)
Dijagram vanjskog okruženja za upotrebu robotske ruke

Naše poslovanje






